
Daniel Calvo

The introduction of new digital technologies in agriculture is transforming the traditional processes and practices that have been used for hundreds of years. As it happens in many other sectors, automation is helping to improve the working conditions in the fields in a moment when new generations are leaving rural areas and when efficiency is key to guaranteeing competitiveness in a completely globalised society. Robotics systems are starting to be slowly adopted by farmers thanks to the launch to the market of autonomous tractors and the possibilities offered by other types of aerial and ground vehicles for monitoring, weeding, harvesting, etc. At the same time, most of these systems incorporate powerful sensors that are able to collect huge amounts of information that can be further analysed and processed not just for their own operation but also to extract valuable information and support decisions through the application of data analytics and artificial intelligence. This data can be even more valuable when combined with other types of sources like IoT devices or Earth Observation imagery.
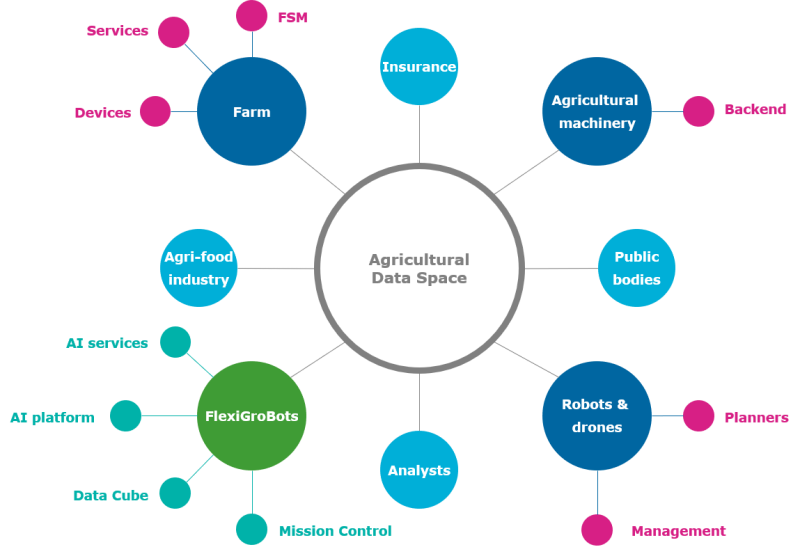
One of the main objectives of the H2020 FlexiGroBots project is to design and implement a platform that is able to overcome some of the current limitations for the creation, management and execution of robotics mission for precision agriculture, where the usage of multiple heterogeneous robots or unmanned vehicles is required. Currently, agricultural robots are relatively isolated systems controlled by their manufacturing company and do not have the possibility to be part of a holistic environment where multiple systems exchange information securely and collaborate to accomplish more complex goals. FlexiGroBots addresses this problem by embracing by design the vision and principles of International Data Spaces, aiming to create one of the first agricultural Minimum Viable Data Spaces in Europe. This vision is elaborated as part of D2.2 Requirements and platform architecture specifications.
Services
In order to facilitate the creation of multi-robot agricultural missions, the first version of the FlexiGroBots platform includes the following services:
- Management of Machine Learning Operations (MLOps) pipelines following an Artificial Intelligence as a Service (AIaaS) paradigm. This part of the platform has been built leveraging Kubeflow, one of the most promising open-source technologies available currently. Within the project, its features are being assessed and tailored to the needs of the three pilots. For data persistence, MinIO, a Kubernetes native object storage system has been also selected. On top of both solutions, the project will work on advanced AutoML features for hyperparameters optimisation and neural architecture search and on a new repository of models including detailed cards.
- Common components that are needed to allow data to be exchanged in a secure and sovereign way enforcing usage policies defined by owners and following the vision of IDSA. These components are the certification authority, Dynamic Attribute Provisioning Service (DAPS) and metadata broker. For the first version of the platform, FlexiGroBots has relied on the existing components implementations available in the IDS Testbed repository. Manifests to allow the deployment of these components on a Kubernetes cluster have been specifically developed and make available for the whole community. Different connectors for robotics platforms, Kubeflow and Farm Management Information Systems (FMIS) that are part of FlexiGroBots are being developed and will be ready for the next version of the platform.
- Geospatial data management and processing services based on Open Data Cube (ODC). In the first version of the FlexiGroBots, the platform provides Command Line Tools for the interaction with the ODC and registration of EO products, a visual explorer, a web user interface to visualise algorithms’ outputs, Jupyter Notebooks and Open Geospatial Consortium (OGC) Web Services.
- Common application services that are powered mainly by the most recent and promising artificial intelligence, machine learning and deep learning techniques. The vision for these services is to ensure their replicability and applicability in a wide range of use-cases beyond FlexiGroBots pilots. Currently, the following services are being implemented:
- SLAM.
- People detection, location and tracking.
- People actions recognition.
- Moving objects detection, location and tracking.
- Orthomosaic assessment tool.
- People anonymization.
- Disease detection in fruits.
- Insect detection in crops.
- Weed detection in row-planted fields.
- A Mission Control Centre (MCC) to design, plan and supervise heterogeneous multi-robot operations for precision agriculture tasks. In the first phase, FlexiGroBots has explored the usage of QGroundControl (GGC), a tool leveraging MAVLINK standard for planning and control of robotics missions considering both aerial and ground vehicles. For future versions of the platform, the project envisions extending and complementing the capabilities of QGC with new advanced capabilities for planning and supervision.
Most of the FlexiGroBots prototypes can be found in the project's GitHub repository. New versions will be released here. Further information about the platform is available at platform page.