Miguel Ángel Esbrí Palomares

As mentioned by a previous blog post about the FlexiGroBots Platform, the “Geospatial enablers and services” is one of its five main components.
The aim of the FlexiGroBots geospatial enablers and services is to provide a set of general-purpose services and features that facilitate the access, visualization, and processing of geospatial datasets necessary for performing daily activities on the farm.
The precision agriculture domain in general (and FlexiGroBots in particular) heavily depends on a variety of heterogeneous spatially enabled information, being Earth Observations (EO) - either collected from satellite imagery and/or UAVs - one of the main inputs for several other agricultural ICT services (e.g., vegetation indices calculation, pest detection, robots mission planning, etc.).
Thus, one of the key geospatial components planned for deployment within FlexiGroBots Agricultural Data Space is a data cube (in this case, leveraging on the open-source solution Open Data Cube (ODC) for facilitating the management and access to the Copernicus satellite imagery (e.g., Sentinel 2) required by the pilots as well as other Earth Observation datasets produced by them (e.g., raster images from the UAVs). This component, together with others, will be the base for implementing other geospatial processing services (some of which will be powered by AI) in the next phases of the project.
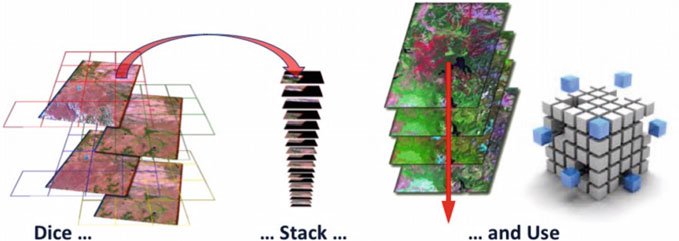
EO data cubes are an advanced way of how users interact with large spatio-temporal EO data (the figure illustrates the principle). The idea is to read incoming image tiles covering an area (“Dice”) and arrange these in time series pixel stacks (“Stack”). This makes access to the time series of observations (“Use”) much easier.
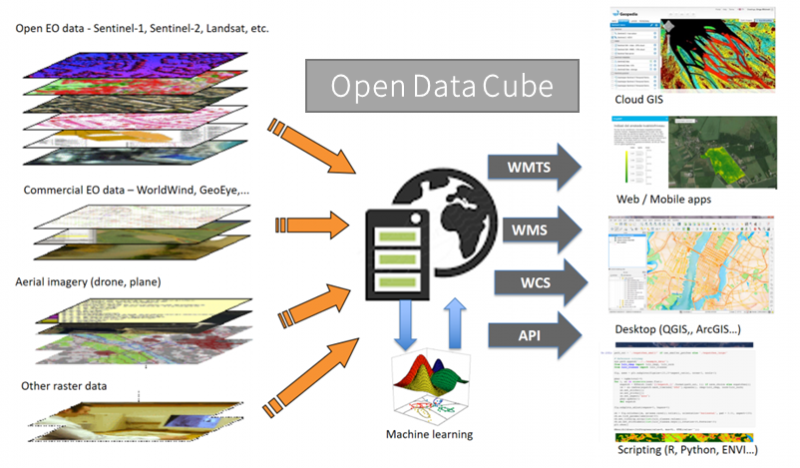
Data cubes implementations (such as the Open Data Cube used in FlexiGroBots) allow accessing a large variety of multi-year global geospatial collections enabling data discovery, visualization, combination, processing and download. They permit to exploit data from a global to local scale (taken from distributed data sources are made accessible through the data cube layer that exposes OGC-standardized interfaces). On top of the data cube layer, platform-based interfaces (web application, mobile application, Jupyter Notebook and APIs), as well as third-party user interfaces, can be deployed.
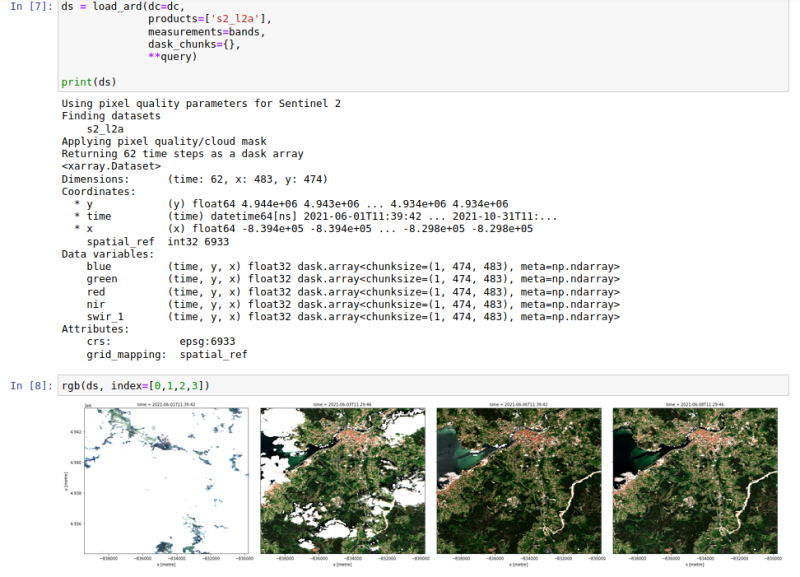
Jupyter Notebook with some sample code and results for the processing of Sentinel 2 images in the Spanish pilot area.
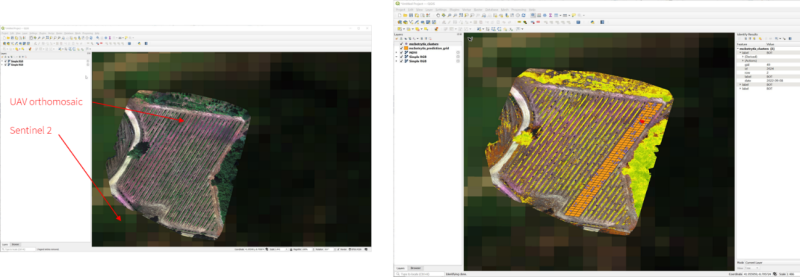
Combined visualization of
- Sentinel 2 (lower resolution),
- UAV orthomosaic (higher resolution),
- NDVI calculated from UAV orthomosaic (the calculation is done on-the-fly by the ODC), and
- the Botrytis vector-based datasets provided by Mapserver component using OGC WFS protocol.